
Using syringes, some plastic or rubber tubing, cardboard and some screws, you can make your own hydraulic robot. Hydraulics uses pressurized liquids to cause motion, and a syringe robot uses the liquid in syringes to move the robot’s parts.
Building a Robot Arm
A good robot doesn't have to look like a human. A simple robot arm can be made from cardboard. A paper towel tube can serve as the body. A thick piece of cardboard or a piece of wood that is at least 4 inches square can serve as the base. For a simple robotic arm that moves up and down, you need two pieces for an arm that can move at the elbow.
To make a C-shaped claw or gripper, you need to make two halves of the C, as a thumb and a finger, using two pieces of cardboard each. The reason each part needs two pieces is to give the robot strength.
To make the arm, cut out two identical pieces for the main arm and join them together using long screws that are at least as long as the diameter of the paper towel tube. Then cut out two identical pieces of cardboard for the forearm. Join these together using the screws at one end of the main arm and then fasten them together at the other end where the wrist would be. If you are making a gripper, make this the same way you made the arm components, and fasten them together at the wrist of the forearm.
Use a hot glue gun to secure the paper towel tube to the base. Cut two holes near the top of the tube and use the screws to secure the main arm to the tube. You should now have a robotic arm that moves at the elbow. If you added a gripper, both halves should move freely at the wrist.
Adding the Syringes and Tubing
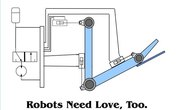
You need two syringes connected with plastic or rubber tubing for each part of the robot that you want to move: a controller and a motion syringe. When you open or close the controller syringe, the motion syringe moves the robot.
Warnings
Remove all needle tips from syringes before you begin. The rubber tubing fits over the needle end of the syringe, and you do not want anything sharp there. Make sure the syringes and tubing are well-sealed to maintain sufficient pressure for movement.
Connect the tubing to the ends of each syringe and fill them with water. To do this, you can remove the plungers from the syringes and hold a finger over one opening while you fill them. Then replace the plungers.
To make the elbow movable, tape one end of the syringe to the main arm near the elbow and, with the syringe half open, tape the syringe's plunger to the forearm while the forearm is at a 45-degree angle at the elbow. When you press the controller syringe plunger, the elbow should open and when you pull the plunger, the elbow should close.
To make the gripper move, tape the motion syringe to the finger and thumb of the claw while both the syringe and the claw are closed. When you press the controller syringe, the motion syringe should open, opening the claw.
Once the robot is working, tape the tubing to the column and tape the control switches to the base. This will let you move the robot to another room without the tubing coming apart and spilling water all over the robot.
References
About the Author
A published author and professional speaker, David Weedmark was formerly a computer science instructor at Algonquin College. He has a keen interest in science and technology and works as a technology consultant for small businesses and non-governmental organizations. A science fiction writer, David has also has written hundreds of articles on science and technology for newspapers, magazines and websites including Samsung, About.com and ItStillWorks.com